
はじめに
ユーザのためのAI入門の第4回講義を受講した。本日のゲスト講師は深尾教授だった。農業は維持・発展させることは国としての自給率を高め、安全・安心に日本人が日本で暮らすためには必要・不可欠な産業である。しかし、農業の課題の一つは農業従事者の高齢化であり、これへの対応策だ。幸い、AIやロボット技術を活用すれば、この解決策になるかも知れないという期待がある。実現にはまだまだ高いハードルがいくつもあるが、今回はそんな農業の自動化の現状について農業自動化の最前線をいく東京大学大学院情報理工学系研究科の深尾隆則教授に講義を頂いた。なお、これはいつも記載しているが、この投稿は講義メモではない。講義の内容で気になったことをネットや図書で確認しながら理解した範疇でまとめたものなので、内容に問題があればその文責は自分にあり、内容が良ければそれは講義のおかげだ。今回は次の2回に分けて投稿したい。
その1:要素技術と農業自動化の現状(⇨ 今回)
その2:進行中のプロジェクトと農業自動化の課題(次回)
ゲスト講師
1992年3月に京都大学工学部を卒業し、1996年3月に京都大学大学院工学研究科を卒業し、情報学の博士である。2001年11月から2003年7月まで米国カーネギーメロン大学のロボティクス研究所の客員研究員として米国で滞在された。そこで「一番いろんなことをやったロボット研究家」とも呼ばれる金出武雄氏によるロボティクスに関する講演を聞いて、実際に「モノ」を見て、衝撃を受けられたようだ。米国での研究経験を活かしながらその後は屋外で利用するフィールドロボティクス分野の研究に転向されている。その後京都大学の助手、神戸大学の助教授、准教授を経て、2015年4月から立命館大学の教授に就任され、現在は、東京大学大学院情報理工学研究科知能機械情報学専攻の教授として、日本の農業をロボティクスで救おうと邁進されている。

(出典:東京大学)
要素技術
今回の講義では、AI+農業というタイトルだ。農業の自動化の現状について触れる前に少し要素技術をレビューしておきたい。
フィールドロボティクス
深尾教授は、フィールド・ロボティクスの推進者である。世の中のさまざまな現場で活躍するロボット技術であり、自動車運転制御、自動車走行制御、飛行ロボット、農業ロボットなどが代表例だ。生産性を高め、災害などの危険を回避し、高齢化に向けての社会創造に貢献することを狙っている。下の図は、深尾教授が取り組んでいるキャベツの自動収穫機の仕組みを説明したものだ。キャベツの位置はカメラで認識する。難しいのは、キャベツは必ずしも直線的に栽培されているわけではないし、高さも微妙にずれているため、これらを把握、補正しながらキャベツを傷つけずに、優しく効率的に収穫する制御技術が重要だ。キャベツを横側から自動で認識する技術をヤンマーグループのヤンマーアグリなどと連携しながら共同で研究されている。ハードはメーカー、ソフトは大学という分担を基本としながらも、ソフトで対応しきれない部分は機械的に工夫してもらったりしているようだ(参考)。
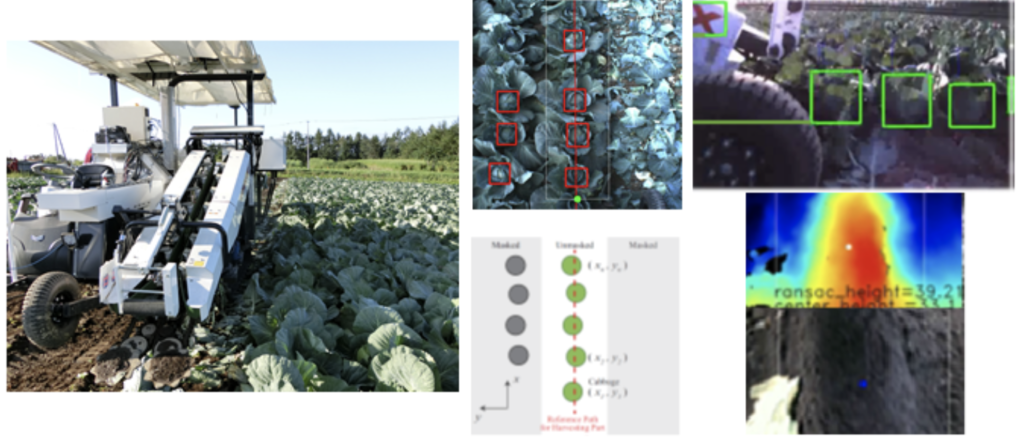
(出典:Dynamic Control System Lab)
LiDAR(Light Detection And Ranging)
講義の中で頻繁に現れるキーワードがある。今回の講義では、LiDARがその一つだ。LiDARとは、光による検知と測距(Light Detection And Ranging)の略だ。近赤外光や可視光、紫外線を使って対象物に光を照射し、その反射光を光センサでとらえ距離を測定するリモートセンシング(離れた位置からセンサーを使って感知する)方式を言う。つまり、レーザ光を対象物に当てて、跳ね返って戻ってくるまでの時間差で距離を計測する仕組みだ。この技術を用いることで対象物との正確な距離を常に把握することが可能だ。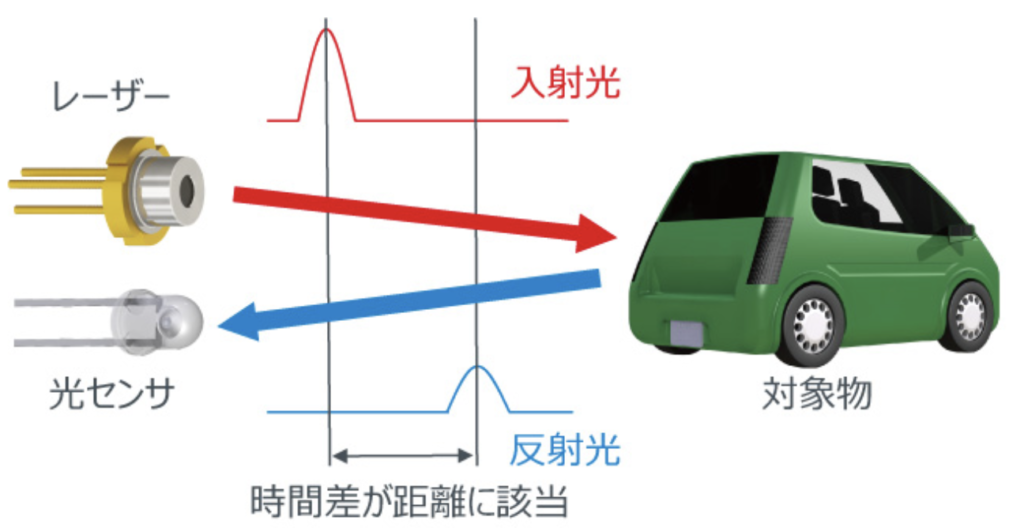
(出典:ROHM)
農業の自動化の現状
各種農作業車両の自動運転
農作業のための農機具の技術革新は産学官で進んでいる。下の写真は今回の講義で紹介されたものではないが、2020年1月に京都において農業機械メーカーのクボタが未来の無人トラクターのコンセプトモデルX Tractorを発表した時のものだ。業界で初となる自動運転田植機だ。まるでアニメに出てくるロボットのようにかっこいと思った。

(出典:CAR WATCH)
双腕ロボットとの連動
高度な動きや操作が可能なアームは一つでも良いけど、実際の農作業を効率的に実施しようとするとやはり双腕型が便利なようだ。下の図は富士電機が開発している双腕ロボットであり、工場のラインなどでも活躍している。双腕ロボットには簡単な訓練をするだけでロボットに作業を教えることができるプログラムが内蔵されている。例えば、下の図のような双腕ロボットだと、カメラがあり、15軸の動作機構が可能で、かつ作業内容によっては必要な治具に変更可能なチャック治具にも対応されている。各種農作業にも威力を発揮させるには、コスト削減や軽量化、扱いやすさの向上、耐久性の改善などの課題を解決する必要がありそうだ。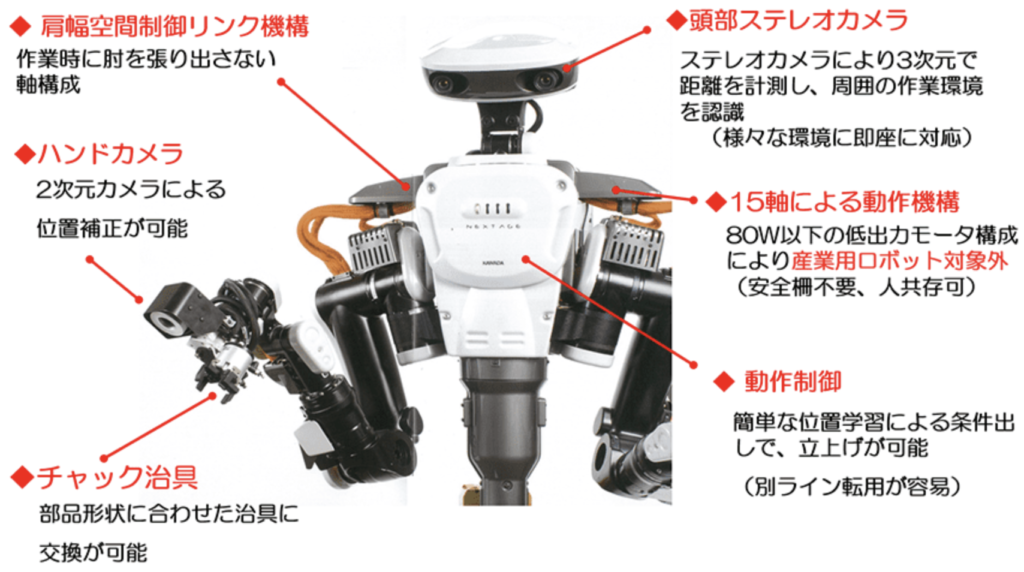
(出典:富士電機機器制御)
果実の成熟度の応じた自動収穫
下の動画は、実際に果樹園で活躍する収穫ロボットだ。コストを抑えるために牽引車両はゴルフ場で使われる電動カートを利用している。そして後部座席に双腕のアームロボットを搭載している。りんごや梨などの果実を優しくグリップして、ぐるぐると回転させることで収穫している。ロボットは、収穫するリンゴ等の成熟度を判断しながら、収穫が必要なリンゴを選んで収穫する。収穫したロボットは自動走行車両の後部に設置された荷台のコンテナーに送り出される。
(出典:YouTube)
ドローンによる薬剤量の低減
ドローンを活用することで農業の効率化と収益化を進めることができる。これは別のセミナーで拝聴したものだけど、キャベツの葉とかに住み着く害虫の存在をドローンで撮影して画像データに貯蓄する。そして、害虫は昼間ではなく、葉の表面に出てくる夜の時間に、その害虫の居場所にピンポイントで農薬を散布する。農薬の散布を幅広く行うのではなく、害虫がいるところに集中して散布するので、農薬の利用料が10分の1以下に減少した。また、農薬の利用が少ないので低農薬食品として販売することが可能だ。低農薬食材として売値を高め、農薬の使用量を減らすことで経費を少なくする。これによって高い収益性が実現できたという。

(出典:SMART AGRY)
キャベツや玉ねぎなどの野菜の自動収穫機器
下の動画は、キャベツを実際に収穫する機械だ。畑から収穫すべき食材を峻別して、キャベツを収穫している。ケージへの詰め込みは作業員が実施している。どこまでを機械化するのか、どこまでを手動で対応するのかは用途に応じて判断されるべきだろう。産業革命の時代に、家内制手工業から工場制機械工業に発展したように、農業も改革の連続だが、AIやロボットを活用できるようになればさらに新たなフェーズに昇華することが期待できると思った。
(出典:YouTube)
自動フォークリフトによるコンテナ運搬
工場内や倉庫内での自動化は進んでいる。特に物流センターなどではアマゾンをはじめ多くの構築例や運用例がある。下の動画は、今回の講義と同様のコンセプトだったので参考に掲載したものだ。床においてあるパレットを指定の場所に運ぶ。高さ5.6mまで持ちあげて収容することができる。作業が全て完了すると指定した場所に自動的に戻ってくるお利口さんだ。
(出典:YouTube)
無人運転トラックによる運搬
トラックの隊列走行などはかなり研究が進んでいる。高速道路は自動走行には向いている。下の図に示す自動運転のスイカ輸送トラックは、ネットで調べたものだけど、運転手が休憩を取る必要がないので、人の運転より10時間も早く1500kmを走破するという。完全な無人化ではなく、安全のために運転席には人が乗っているが、最初の100kmほどはハンドルを握っていたが、その後は自動運転に任せた。その結果、通常なら24時間ほどかかるのに、自動運転のトラックはひたすら走ってくれるので約14時間で完走した。鮮度の高い生鮮食品の輸送などには威力を発揮すると期待される。このTuSimpleは、2024年末までには完全自動運転を実現する計画だという。
(出典:Engadget)
ランドマーク(ポール)設置による自動走行
高速道路は自動車が高速走行するために設計された道路であるが、自動走行する道路は農道だったり、狭い道だったりする。そんな時に有効なのがランドマーク(ポール)の活用だ。ランドマークで検索すると、バス停に正確に停車して、後続の車両の邪魔にならないような運用をしている例が見つかった。このようなコンセプトの運用だと理解した。深尾教授は、安全な走行を実現するには冗長性が大事だと指摘されていた。つまり、カメラからの映像信号と、LiDARからの信号だ。どちらか一方でも走行は可能だけど、複数の信号を組み合わせることで、視界が悪い場所でも、LiDARを使えないような場所でも安全に走行できる。自動運転車が社会に受け入れられるには、インフラ側への投資も必要かつ有効だ。携帯電話の世界でも端末への投資額とインフラへの投資額には相関がある。端末数の増大や端末の高度化に伴って、基地局側の投資も増大する。同様に、自動運転に対応する車両が増大すれば、それを支えるインフラにも投資することで円滑な運用や事故・トラブルの回避や解消が可能となるものと理解している。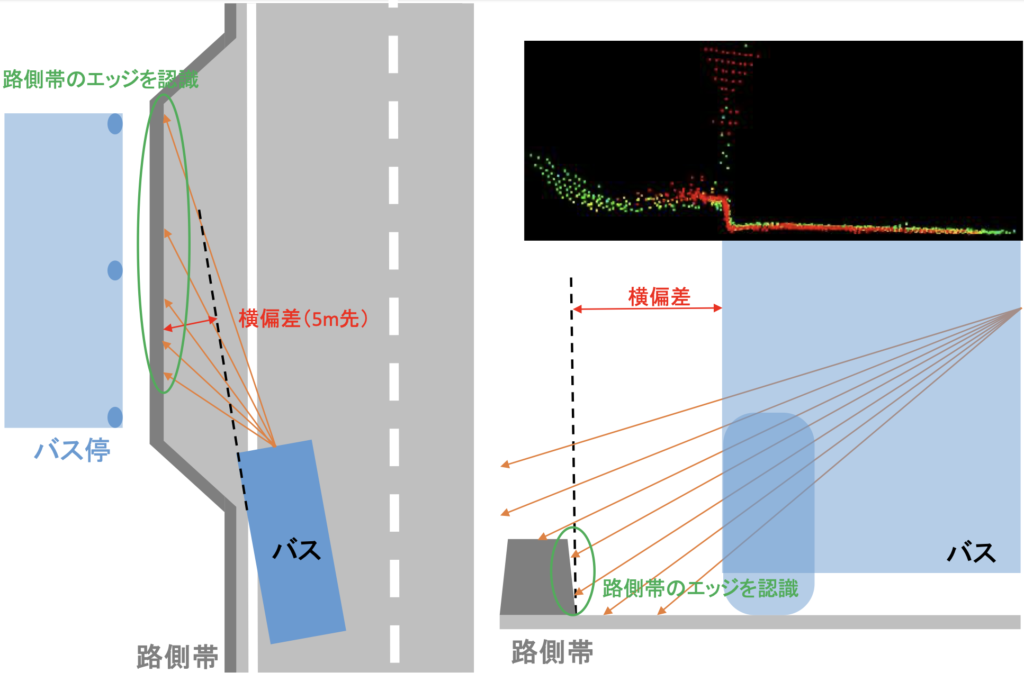
(出典:先進モビリティ)
まとめ
今回はAI+農業というテーマでの講義を2回に渡って投稿する。後半のその2では、現在進行中の農業関係のプロジェクトや、農業自動化の課題、そして、講義での質疑などのについてまとめておきたい。貴重な講義をありがとうございます。関係者のご尽力に感謝します。
以上
最後まで読んで頂き、ありがとうございました。
拝
その2(概要)
進行中の農業関係プロジェクト
畜産バイオガスシステム
大規模果樹の収穫作業自動化
農作物に適したロボットアーム等を活用した農作業自動化技術
農業の自動化の課題
過剰な品質と適正な品質
人材確保と人材育成
適切な法規制と育成施策
質問
大規模農園での適用と中小規模農園
ソーラーシェアリングによるソーラーシェアリングによる収益性改善の可能性


