はじめに
2021年10月15日に行われた脳型情報処理機械論の第二回目の講座については、4回に分けて投稿しており、今回はその4回目だ。
・その1:視覚系の情報の流れ(特に視覚系)
・その2:視覚系の情報の流れ(自己組織化マップ等)
・その3:脳の運動制御系 (脳、神経、筋繊維等)
・その4:具象化された脳、行動、認知の発達 ⇨ 今回
國吉教授の表情も気持ち明るい気がする。自らが研究してきた立ち上がりのロボットや赤ちゃんロボットの紹介などがあった。
ロボット
受動歩行ロボット
ロボットは定義が難しい用語の一つだ。元々は、チェコスロバキアの小説家カレル・チャペックの戯曲で使われたロッサム万能ロボット商会が語源だ。ロボットの明確な定義はないようだが、「人に代わって作業をするために作られた存在」という概念がある。日本では産業用ロボットが普及し、活躍している。日本人は、鉄腕アトムや鉄人28号などのアニメ文化の影響もあり、人型ロボットのイメージがある。海外では、動物を模したようなロボットの開発が活発だ。残念ながら事業化から撤退したけど本田技研のアシモは人型で歩行にチャレンジしたロボットだった。下の図は、ロボット肢の状態に関するフィードバックデータを受け取って、ロボット肢の状態を判定するように構成された有限状態機械と、該有限状態機械から状態情報を受け取ってロボット肢の関節トルクに指令を与える筋肉モデルプロセッサと、筋肉モデルプロセッサによって決定された生体模倣型のトルク及び剛性をロボット肢の関節に指令するように構成された関節指令プロセッサとを備えている状況を示している。
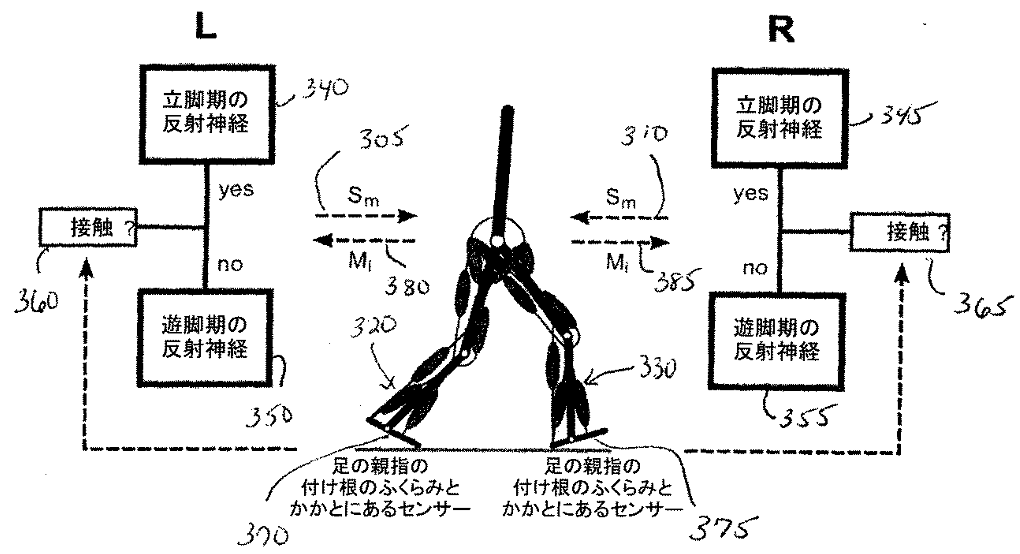
(出典:astamuse)
基本歩行動作の生成(不随意的)
下の図は、ロボットの基本歩行動作の基本的な3つの要素を示す。歩行制御は、基本動作、姿勢反射、タイミング生成の3要素を統合することで歩行動作を実現する。
・基本制御:外力が加わらなければそれのみで歩行可能な安定した 軌道再現型の歩行モーション
・姿勢反射:上体の垂直制御を行う。
・タイミング生成:ロボットの固有振動数に同期する歩行リズムの生成。
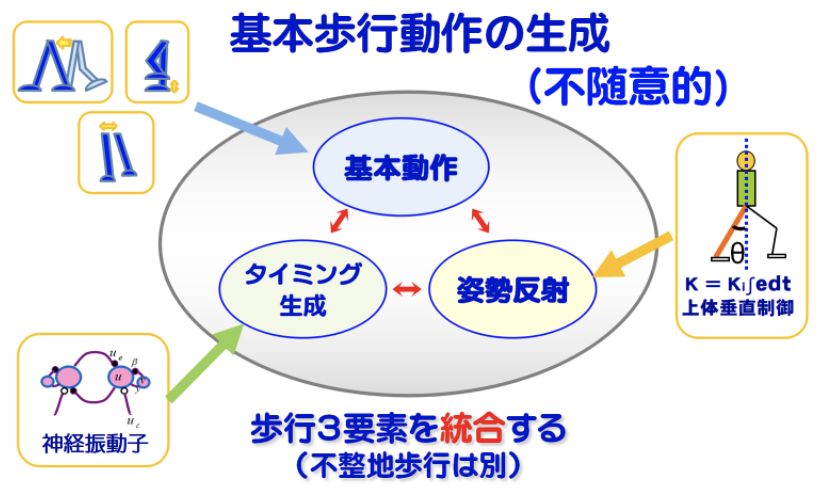
(出典:uvc)
腰部ハンガー反射を持ちた歩行ナビゲーション
これは、講義の後で調べていて興味深いと感じた仕組みだ。通常のナビゲーションでは、GPSの信号を解析して、人間に視覚的なナビ情報を示すものだが、これだと画面を見て、理解する必要がある。今回紹介するスキームはそうではなく、人間の腰に取り付けた装置により、直接的に人間に右旋回や左旋回などの情報を肉体的に示すものだ。これは面白いアイデアだと思う。ゴルフ大好きの自分としては、ゴルフスウィングにおいて腰の回転や両肩の回転をうまくナビゲーションしてくれる補正ツールがあると嬉しいと思った。

(出典:Campus Create)
生活リズムとセロトニンの分泌
早起きは三文の徳と言う。三文は今でいえば100円ぐらいか。金銭的には僅かでも、これを繰り返すと大きな徳を得られる。どう言うことかと言えば、生活のリズムを整えるのは、朝起きて、朝日を浴びたり、朝の体操をすることで1日のリズムを作ることで体内のセロトニンの分泌が活性化される。セロトニンが分泌されると、精神を安定させたり集中力を高めたり、また体調を整えたりと心と体のバランスが整えられる。素晴らしい。セロトニンは、姿勢を維持したり、体の痛みを抑えたりする働きもある。毎朝同じ時間に起きて、運動をすれば、体は健康で若々しく、心にもゆとりが生まれる。まさに三文の徳だ。逆にストレスが高まるとセロトニンが分泌が不足する。夜遅くまで仕事をして、運動不足、睡眠不足で寝起きも悪い生活をしていると悪循環に陥る懸念がある。夜は早めに寝て、朝方で生活でセロトニンを活性化させたい。
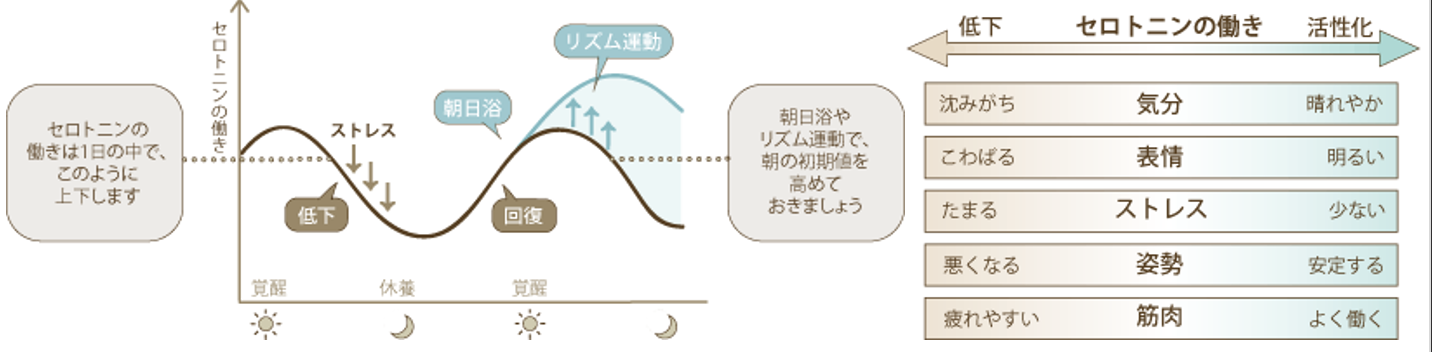
(出典:色選択性細胞)
幻肢
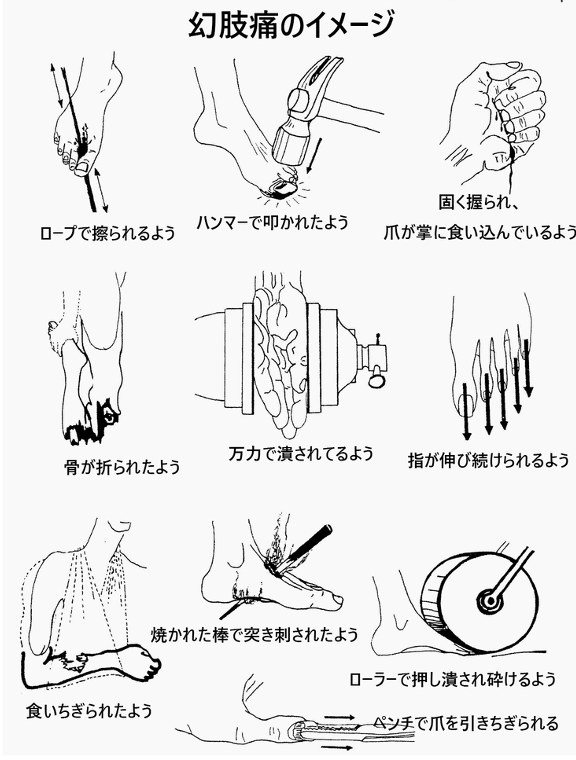
幻肢痛
以前、筋電義手について投稿した。しかし、事故や病気で手足を切断もしくは神経を損傷した方は、幻肢痛(げんしつう)に悩まされることがある。これは、以前と変わらず存在するかのように感じている手足を「幻肢」による痛みだ。幻肢痛は24時間絶えず襲う痛みに加え、不規則な間隔で「釘で刺されたような痛み」や「粒の粗い砂利が血管を流れている痛み」「ローラーで踏み潰されたような痛み」などが襲い掛かってくる。人により痛みの感じ方は様々だが、呼吸もできずにうずくまってしまうほどの痛みに襲われることもある。
(出典:Ready for)
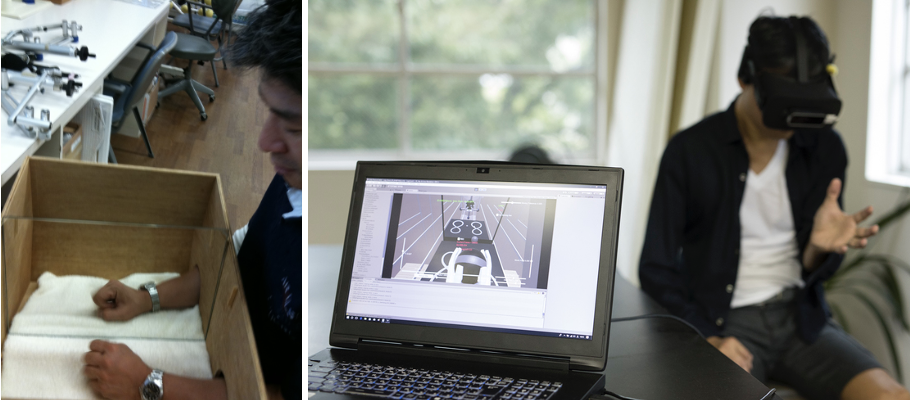
幻肢の治療
幻肢の治療法に鏡療法がある。鏡療法は腕や脚の間に鏡を置いて、映し出された非麻痺側の手足の動きの像を麻痺側の手足が正常に動いているように錯覚させるリハビリテーション療法である。この治療により、動きや感覚、痛みなどを司る様々な脳領域が刺激されることで改善することがあるが、鏡療法の正確な作用メカニズムはまだ不明であるし、効果が得られないケースもある。このため最近では、VRを活用した治療方法が試されている。デジタル技術を使えば、当事者個々が持つ幻肢イメージに合わせて思い通りに動く幻肢をビジュアル化できる。これをVRハンドといい、立体視映像を作り出せるゴーグル型のディスプレイ(HMD)を被ることで、VRハンドをリアルに感じ、鏡療法では起こせなかった錯覚が得られやすくなる。
(出典:Ready for)
赤ちゃんロボット(Noby)
これは2010年に國吉教授が関わったプロジェクトだ。9か月児の身体特性と感覚運動機能を高精度に再現したロボット「Noby」を、東京大学と大阪大学の研究チームが開発したものだ。Nobyは「Nine Month Old Baby(生後9か月の赤ちゃん)」の略であり、人間の認知発達メカニズムを理解するために開発されたロボットだ。身長71センチ、体重7.9キロ、頭部にマイク2つとカメラ2台が搭載され、全身には約600個のセンサーが付いている。赤ちゃんロボットは乳児の抱っこの仕方を学べるとして、富山県立大学の工学部と看護学部の連携研究で開発し、小児看護学教育への活用を図っている。

(出典:Mode Press)
まとめ
人型ロボットに欧米は抵抗感を感じているが、日本人はあまり抵抗感がない。これは鉄腕アトムなどのアニメ文化の影響もあるだろう。人型ロボットが人間に似てくると好印象になるが、一定以上に類似すると逆に不気味と感じる。これを不気味の谷と言う。しかし、これがさらに似るとまた感情はプラスになる。現在のロボットは、かなり精巧にできている。不気味の谷は越えたのだろうか。
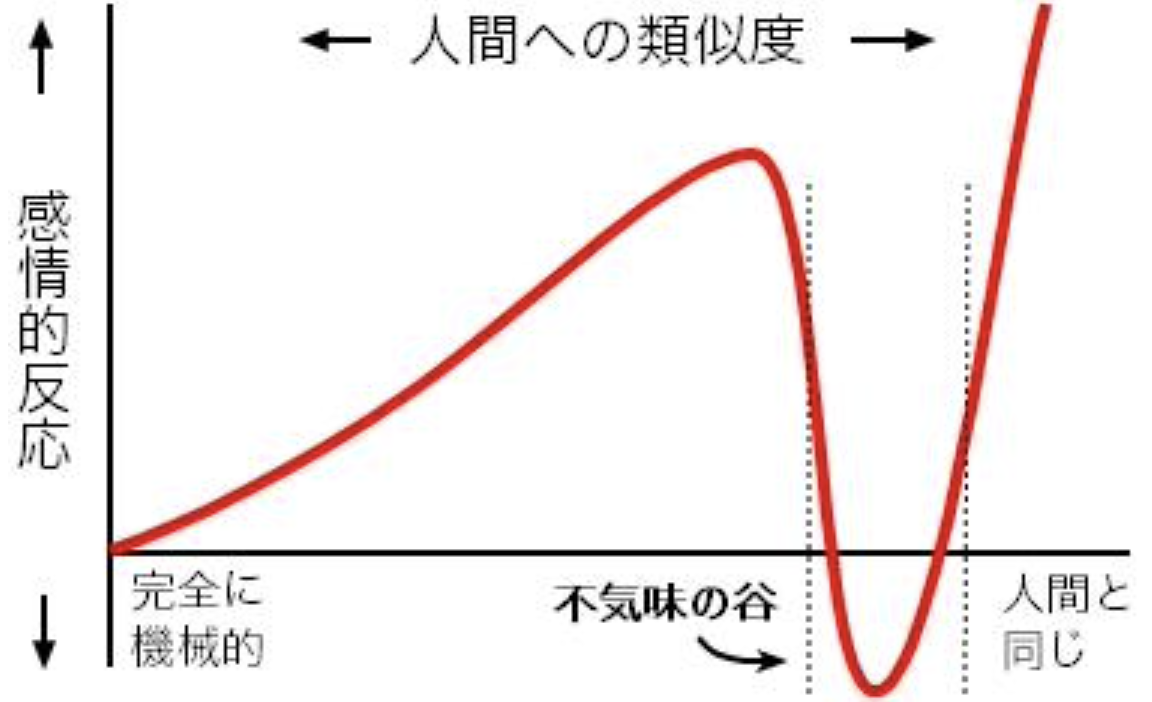
(出典:不気味の谷現象)
以上
最後まで読んで頂きありがとうございます。
拝